Mr. Woodcock
SparkFun 9DoF Razor IMU M0
9DoF Razor IMU M0 Hookup Guide
MPU-9250 Hookup Guide
github.com/Razor-AHRS/razor-9dof-ahrs
MPU-9250
Accelerometer, Gyro and IMU Buying Guide
SensorWiki.org: Gyroscope
Battery
JST PH-2P
LiPo Akku Stecker – LiPol Battery Co., Ltd.
Olimex BATTERY-LIPO800mAh
Adafruit 1578 – Lithium Ion Polymer Battery 3.7V 500mAh
LiPo Akku 900mAh (3.7 V, 2 mm JST)
LiPo Akku 400mAh (3.7 V, 2 mm JST)
LiPo Akku 800mAh (3.7 V, 2 mm JST)
Adafruit 2011 – Lithium Ion Battery 3.7v 2000mAh
Adafruit 258 – Lithium Ion Polymer Battery 3.7V 1200mAh
Polymer Lithium Ion (LiPo) Akku – 850mAh
Adafruit Lithium Ion Polymer Akku 3.7V, 2500mAh
Jamara Akku CCX (LiPo, 3.70V, 800mAh)
JHY LiPo 503048-3.7V-750mAh
3.7V 750mAh Lithium Polymer Li-Po Akku
Lithium Ion Polymer Battery – 3.7v 500mAh
Lithium Ion Polymer Battery – 3.7v 1200mAh
- Schollenberger (scol)
- Nussberger (nusm)
- M.Sc. Jan Zwiener, NAVKA
Zero-Velocity Detection — An Algorithm Evaluation
Zero-velocity detection in pedestrian navigation systems—an algorithm evaluation
A Novel Vehicle Stationary Detection Utilizing Map Matching and IMU Sensors
- accelerationmoving variance detector
- acceleration magnitude detector
- angular rate energy detector
Kinematische Ketten
ARYS Pro
antiallergene Materialien
Seite 17
- Koppelnavigation (englisch: dead reckoning)
- Bewegungsspuren = zurückgelegte Strecke eines Fußgängers
- Schrittvektoren = relative Positionsänderung eines Schrittes
- GPS = Triangulation
- Seefahrt => Geschwindigkeit, die Richtung und die Zeit => relative Positionsänderung
- über die Zeit eine größer werdende Ungenauigkeit in der Positionierung
- sechs physikalische Freiheitsgrade
- drei Freiheitsgraden der Translation => Bewegung des Schwerpunktes
- drei Freiheitsgraden der Rotation => Drehbewegungen um den Schwerpunkt
- Gyroskopen => Messung der Rotation
- Beschleunigungssensoren => Messung der Translation
- Der hier vorgestellte Entwurf basiert auf der Erfassung der Bewegungsspuren mittels auf dem Fuß befestigter IMU.
- Zero-velocity updates (ZUPT)
- menschlichen Gang => Stand- und einer Geh-Phase
- Mit ZUPT wird nun versucht die Stand-Phase zu erkennen. Die Geschwindigkeit wird dann
auf 0 zurückgesetzt. - Korridore meist parallel oder orthogonal zu Außenwänden
- Fox05: E. Foxlin. Pedestrian tracking with shoe-mounted inertial sensors. Computer
Graphics and Applications, IEEE, 25(6):38–46, 2005. (Zitiert auf den Seiten 12, 16
und 17) - Wik13a: Wikipedia. Kalman filter
- NSHH12: J.-O. Nilsson, I. Skog, P. Handel, K. Hari. Foot-mounted INS for everybodyan
open-source embedded implementation. In Position Location and Navigation
Symposium (PLANS), 2012 IEEE/ION, S. 140–145. IEEE, 2012. (Zitiert auf den
Seiten 12, 16 und 17) - FTSH13: C. Fischer, P. Talkad Sukumar, M. Hazas. Tutorial: Implementing a Pedestrian
Tracker Using Inertial Sensors. Pervasive Computing, IEEE, 12(2):17–27, 2013.
(Zitiert auf Seite 17) - JSZ+12: A. R. Jiménez, F. Seco, F. Zampella, J. C. Prieto, J. Guevara. Improved heuristic
drift elimination with magnetically-aided dominant directions (MiHDE) for
pedestrian navigation in complex buildings. Journal of Location Based Services,
6(3):186–210, 2012. (Zitiert auf den Seiten 18 und 19)
imu drift compensation position
IMU sensor and compensation
Quaternion IMU Drift Compensation: Accelerometer
Drehratensensor
Eulersche Winkel
Gimbal Lock
Inertiale Messeinheit
Magnetometer
Trägheitsnavigationssystem
Koppelnavigation
Gleitender Mittelwert, Moving Average, Moving Median, Digitale Signal Verarbeitung (Digital Signal Processing DSP)
sparkfun/MPU-9150_Breakoutfirmware/MPU6050/Examples/MPU9150_AHRS.ino
IMU Brick
IMU Brick 2.0
Affordable 9 DoF Sensor Fusion, 30 Jan 2016
ardumower.de: Kompaß, Beschleunigung, Gyro
ardumower.de: Rasensensor
CH Robotics Library
Books
Multisensor Attitude Estimation: Fundamental Concepts and Applications
Old
SparkFun 9DOF Razor IMU w/AHRS
AVR910: In-System Programming using mbed
Luke Petre / RazorAHRS
Position Tracking IMU
- Attitude and Heading Reference System (AHRS)
- Inertial Navigation System (INS)
- Inertial Measurement Unit (IMU)
- direction-cosine-matrix (DCM)
- magnetic angular rate and gravity (MARG)
- Kalman Filter
- Complementary Filter
- Mahony Filter
- Madgwicks Fusion Algorithmus
- Madgwick Filter
- Sigma-Punkt Filter
- Bias Filter
- Zustandsraummodell
- Schätzfehler
- Taylorentwicklung
- Taylorapproximation
- Divergenz
- Modellfunktion
Trägheitsnavigation
Guide to gyro and accelerometer with Arduino including Kalman filtering
cccgoe.de Trägheitsnavigation
OpenShoe – Foot-mounted INS for Every Foot
Building an AHRS using the SparkFun “9DOF Razor IMU”
Reading data from/Interfacing with 9DOF Razor IMU
razor_imu_9dof
github: KristofRobot/razor_imu_9dof
MPU-9250 and Arduino (9-Axis IMU)
Calculating displacement using Accelerometer and Gyroscope (MPU6050)
Using accelerometer, gyroscope and compass to calculate device’s movement in 3D world
NXP: Implementing Positioning Algorithms Using Accelerometers (PDF)
Open source IMU and AHRS algorithms
Open source AHRS with x-IMU
github.com: xioTechnologies/Open-Source-AHRS-With-x-IMU
IEEE International Conference on Rehabilitation Robotics 2011: Estimation of IMU and MARG orientation using a gradient descent algorithm
Calculating position displacement using accelerometer and Gyroscope?
Direction Cosine Matrix IMU: Theory
A free and open implementation of DCM based on FreeIMU
FreeIMU: an Open Hardware Framework for Orientation and Motion Sensing
Understanding the various attitude estimation methods
How to determine position from gyroscope and accelerometer input?
A Guide To using IMU (Accelerometer and Gyroscope Devices) in Embedded Applications., Dec 2009
Arduino code for IMU Guide algorithm. Using a 5DOF IMU (accelerometer and gyroscope combo), Jan 2010
DCM Tutorial – An Introduction to Orientation Kinematics, May 27, 2011
Guide: Gyro and Accelerometer Kalman filtering, with the Arduino, June 14th, 2011
github.com: TKJElectronics/Example-Sketch-for-IMU-including-Kalman-filter
ENTWICKLUNGUND TEST EINES INERTIAL VIGATIONSYSTEMS IN EINER SCHMELZSONDE DES RANGE PROJEKTS (PDF)
Kalman Filter
Kalman-Filter verstehen – Literatur gesucht
Das Kalman-Filter einfach erklärt [Teil 1]
Das Kalman Filter einfach erklärt [Teil 2]
Das Extended Kalman Filter einfach erklärt
Kalman Filter For Dummies
OlliW.eu: IMU Data Fusing: Complementary, Kalman, and Mahony Filter
Combine Gyroscope and Accelerometer Data
Tracking 2D positioning with IMU Sensor
Tracking Position in 3d space using 10-DOF IMU
Kalman-Filter
Reading a IMU Without Kalman: The Complementary Filter
Kalman filter vs Complementary filter
Koppelnavigation
Dead reckoning
Filter mit endlicher Impulsantwort (FIR-Filter)
Kalman Filter Simulation
Kalman-Filter (Simulation)
Design and use Kalman filters in MATLAB and Simulink
Estimating Position of an Aircraft using Kalman Filter
Videos
Tutorial: Kalman Filter with MATLAB example part1
MPU-6050 6dof IMU tutorial for auto-leveling quadcopters with Arduino source code
MPU-6050 6dof IMU tutorial for auto-leveling quadcopters with Arduino source code – Part 2
3D Orientation-Rotation Tracking using MPU9250
IMU 9-axis MPU9250 and Madgwick’s AHRS Algorithm
MPU 9250 data display on MATLAB
3D Tracking with IMU
GoogleTechTalks: Sensor Fusion on Android Devices: A Revolution in Motion Processing
Electronics
TE Connectivity (TE)
Measurement Specialties (MEAS) MS5611-01BA – high resolution altimeter
This barometric pressure sensor is optimized for altimeters and variometers with an altitude resolution of 10 cm
Arduino
/c/Program\ Files\ \(x86\)/Arduino
/c/Users/bachman0/Documents/Arduino
/c/Users/bachman0/AppData/Local/Arduino15
C:\Users\bachman0\AppData\Local\Arduino15\packages\arduino\hardware\samd\1.6.12
./packages/SparkFun/hardware/samd/1.3.2/variants/SparkFun_9DoF_M0/variant.h:
#define SERIAL_PORT_USBVIRTUAL SerialUSB
./packages/arduino/hardware/samd/1.6.12/cores/arduino/USB/CDC.cpp
./packages/SparkFun/hardware/samd/1.3.2/cores/arduino/USB/CDC.cpp:
Serial_ SerialUSB(USBDevice);
./packages/arduino/hardware/samd/1.6.12/cores/arduino/USB/USBAPI.h
./packages/SparkFun/hardware/samd/1.3.2/cores/arduino/USB/USBAPI.h:
extern Serial_ SerialUSB;
/c/Program Files (x86)/Arduino/libraries/SD/src/utility/SdFat.h:
class SdFile : public Print {
/c/Program Files (x86)/Arduino/libraries/SD/src/utility/SdFile.cpp
Arduino for M0
Adapting Sketches to M0
Start with Arduino M0
Serial ports and AD converter with M0
Software reset in Arduino Zero
https://github.com/adafruit/Adafruit_ASFcore: ASF (Atmel Software Framework) for Arduino Zero / Adafruit Feather M0 (SAMD21)
github.com/adafruit/Adafruit_ZeroI2S: Adafruit Zero I2S Library
SERCOM = Using SPI, I2C and Serial
Using ATSAMD21 SERCOM for more SPI, I2C and Serial ports
Adding more Serial Interfaces to SAMD microcontrollers (SERCOM)
Master Writer/Slave Receiver
Arduino Zero as I2C slave. NAK address.
// variants/arduino_zero/variant.h #define SERIAL_PORT_USBVIRTUAL SerialUSB // config.h #define LOG_PORT SERIAL_PORT_USBVIRTUAL LOG_PORT.print(imuLog) //add these three lines to redefine Serial as SerialUSB on an M0 processor #if defined(ARDUINO_ARCH_SAMD) #define Serial SerialUSB #endif
I2C
I2C – Two-Wire Peripheral Interface – for Arduino
Wire
Master Reader/Slave Sender
Master Writer/Slave Receiver
Interrupt
noInterrupts()
Multi-tasking the Arduino – Part 1
Multi-tasking the Arduino – Part 2 – Timer and Interrupt Etiquette
Processor Interrupts with Arduino
Critical sections in Arduino, interrupt consuming data
Feather M0 timer for timer interrupt
Arduino ZERO timer interrupts
Arduino Zero / M0 pro in sleep mode
arduino – Eine Einführung – Interrupts
Arduino Interrupt misbehaving
Sound In
F
| SCK (Serial Clock) / BCLK (Bit Clock Line) | clock signal |
| FS (Frame Select) / WS (Word Select) | discriminate Right or Left Channel data |
| SD (Serial Data) | serial data to be transmitted |
|
|
|
ICS-43432 Low Noise Microphone with I2S Digital Output
ICS-43432 MEMS Microphones
tindie ICS43432 I2S Digital Microphone
Arduino Projects: Digital Audio Recorder
Adafruit I2S MEMS Microphone Breakout – SPH0645LM4H
Adafruit I2S MEMS Microphone Breakout
Adafruit I2S MEMS Microphone Breakout – Arduino Wiring & Test
github.com/adafruit/Adafruit_ZeroI2S
Arduino Sound library
I2S (de)
I2S (en)
WAV (en)
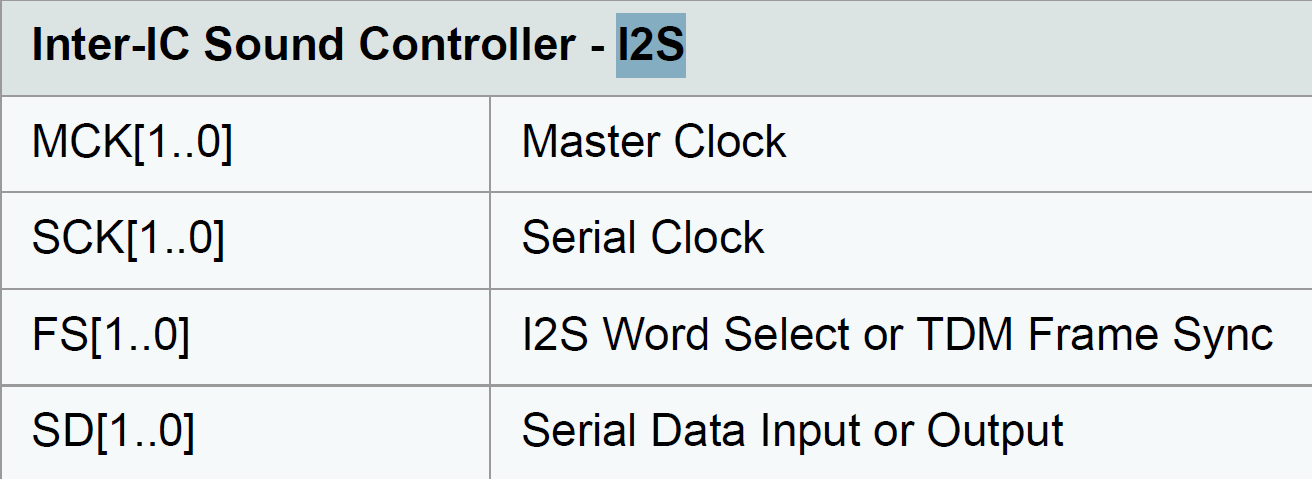
Inter-IC Sound (I2S / PCM)
I2S bus specification (PDF)
I2S and PCM format
i2s format and PCM format
I2S and PCM format
High Quality Audio with I2S – Part 1
High Quality Audio with I2S – Part 3
ArduinoDueHiFi
Audio playback and recordin
g using the STM32F4DISCOVERY
github.com/TMRh20/TMRpcm
Adafruit Wave Shield for Arduino Kit – v1.1
waverp – An Arduino Library for recording and playing wave files on the Adafruit Wave Shield
Arduino recording .wav files ?
Sound Out
Adafruit I2S 3W Class D Amplifier Breakout – MAX98357A
Adafruit MAX98357 I2S Class-D Mono Amp
SimpleTone
ICS43432 I2S sound recording and playback (Arduino-Original)
github.com/adafruit/Adafruit_ZeroI2S, 2S audio playback library for the Arduino Zero / Adafruit Feather M0
WAV
WAVE PCM soundfile format
WAV-Dateiformat
Intro to Audio Programming, Part 2: Demystifying the WAV Format
SD Card
SD Card Info Returns wrong size
github.com/greiman/SdFat – Arduino FAT16/FAT32 Library
EEPROM / Flash
Memories of an Arduino – Using EEPROM
FlashStorage library for Arduino
Vibra Motor
SparkFun Haptic Motor Driver – DRV2605L
Haptic Motor Driver Hook Up Guide
USB Serial
Adafruit Feather M0 Adalogger – Feather HELP!
Debug
OpenOCD/CMSIS-DAP Debugging with Eclipse and without an IDE
Debug sketch on Arduino Zero Pro with GDB and OpenOCD
- Atmel Embedded Debugger (EDBG)
- CMSIS-DAP
- ARM Coresight Debug Access Port
- CoreSight Debug and Trace Unit
- CDC Virtual COM port

|
Different Products
Circuit Playground – Developer Edition
Circuit Playground Slouch Detector
Circuit Playground Combadge
Shop
Maker-Shop.ch
Adafruit I2S MEMS Microphone Breakout – SPH0645LM4H (play-zone.ch)
Adafruit DS3231 Precision RTC Breakout (play-zone.ch)
Adafruit I2S 3W Class D Amplifier Breakout – MAX98357A (play-zone.ch)
Adafruit I2S MEMS Microphone Breakout
Adafruit I2S MEMS Microphone Breakout – SPH0645LM4H (play-zone.ch)
Adafruit TCA9548A 1-to-8 I2C Multiplexer Breakout
Adafruit TCA9548A I2C Multiplexer (play-zone.ch)
SparkFun I2C Expander Breakout – PCF8575 (retired)
SparkFun 16 Output I/O Expander Breakout – SX1509
SX1509 I/O Expander Breakout Hookup Guide
SparkFun Logic Level Converter – Bi-Directional
Bi-Directional Logic Level Converter Hookup Guide
SparkFun DeadOn RTC Breakout – DS3234 (SPI)
SparkFun Real Time Clock Module (I2C) => 5V !!
Adafruit DS3231 Precision RTC Breakout
Adafruit DS3231 Precision RTC Breakout (play-zone.ch)
SparkFun Transceiver Breakout – nRF24L01+
nRF24L01+ Transceiver Hookup Guide (SPI)
mbed
Sparkfun SAMD21G18 target
TARGET_SAMD21J18A/samd21g18a.h
github.com/ARMmbed/mbed-hal-atmel-samd21g18a (not working ?!)
ithub.com/ARMmbed/mbed-os/targets/TARGET_Atmel/TARGET_SAM_CortexM0P/TARGET_SAMD21G18A (not working ?!)
Quaternionen / Rotation Matrix
‘Difference’ between two quaternions
Difference between the two quaternions
quaternion libraries in C/C++
Maths – Quaternion Code
Quaternion C++ Class
Quaternion to rotation matrix – am I blind or just doing it wrong?
Quaternion zu EulerWinkel umrechnen
Compute Angle Between Quaternions (in Matlab)
Filter
Moving average
Gleitender Mittelwert
Median filter
Rangordnungsfilter
What are the mean and median filters?
Mean filter, or average filter
Median filter
Mean Filter
JLink
$ /opt/SEGGER/JLink_V512f/JLinkExe -device ATSAMD21G18 -if SWD -speed 4000 SEGGER J-Link Commander V5.12f (Compiled May 17 2016 16:01:56) DLL version V5.12f, compiled May 17 2016 16:01:51 Connecting to J-Link via USB...O.K. Firmware: J-Link V9 compiled Apr 22 2016 11:47:06 Hardware version: V9.20 S/N: 269200000 License(s): GDB, RDI, FlashBP, FlashDL, JFlash, RDDI VTref = 3.298V Type "connect" to establish a target connection, '?' for help J-Link>connect Device "ATSAMD21G18" selected. Found SWD-DP with ID 0x0BC11477 Found SWD-DP with ID 0x0BC11477 Found Cortex-M0 r0p1, Little endian. FPUnit: 4 code (BP) slots and 0 literal slots CoreSight components: ROMTbl 0 @ 41003000 ROMTbl 0 [0]: 9F0FC000, CID: B105100D, PID: 000BB4C0 ROM Table ROMTbl 1 @ E00FF000 ROMTbl 1 [0]: FFF0F000, CID: B105E00D, PID: 000BB008 SCS ROMTbl 1 [1]: FFF02000, CID: B105E00D, PID: 000BB00A DWT ROMTbl 1 [2]: FFF03000, CID: B105E00D, PID: 000BB00B FPB ROMTbl 0 [1]: 00003000, CID: B105900D, PID: 001BB932 MTB-M0+ Cortex-M0 identified. J-Link>